
In collaboration with the Organization for the Development of New Energy and Industrial Technology (NEDO) and KDDI Corporation (KDDI), Japan Airlines (JAL) announced that it conducted a demonstration where a remote pilot simultaneously operated a total of five drones across four different locations in Japan between October 28 and 31, 2024.
This demonstration was part of NEDO’s project titled «Development of technologies for drones or unmanned aircraft systems enabling simultaneous operations of multiple drones», under the framework of the «Project for the implementation of advanced air mobility (ReAMo Project)».
As reported by our affiliated media outlet, AEROIN, during the demonstration, KDDI developed a control system for simultaneous operations of multiple drones, while JAL conducted a risk assessment based on its expertise in aviation safety and technology, establishing operational procedures. A notable feature of the system is the incorporation of voice notification and operational support functions for irregular situations to prevent human error.
As a result, a single pilot safely and efficiently operated five drones across four distinct locations in Japan under various weather conditions and operational environments, confirming the effectiveness of the air safety system and control procedures.
On the other hand, issues were also identified when irregularities occurred, such as drone or system failures, or simultaneous environmental changes. Data were collected to contribute to enhancing the system’s functions and improving operational control quality in the future.
The findings from this experiment will be used in designing a system for the control of simultaneous operations of multiple drones, which will be developed jointly by public and private sectors, contributing to the social implementation of drones.
Drones are increasingly being implemented and commercialized in Japan to address various social issues, such as the 2024 logistics crisis, labor shortages due to the declining workforce, aging social infrastructure, and the depopulation and aging of local communities.
To achieve this goal, in addition to establishing remote, automated, and beyond-line-of-sight operation technologies requiring precise monitoring and judgment in limited flight conditions, an advanced operational control system that includes the simultaneous operation of multiple drones is necessary, contributing to increased efficiency and labor savings.
It is essential to define the technical requirements and operational procedures for control systems through risk assessments and corresponding mitigation measures.
In this context, since the 2022 fiscal year, NEDO has been working on the following research and development elements as part of this project to establish operational requirements and develop a control system for simultaneous operations of multiple drones:
- Analysis of system and operational requirements for one-to-many operations.
- Development of a control system for one-to-many operations.
- Obtaining approval for flight verifications.
- Flight demonstrations of multiple drones simultaneously in various airspaces.
- Verification of the commercial potential of one-to-many operations.
During the demonstration, the number of flight locations was expanded to four, and a remote pilot simultaneously operated five drones at these sites. Remote operation of autopiloted drones requires advanced control, involving real-time monitoring of flight status and weather conditions through monitoring screens and performing manual interventions when necessary.
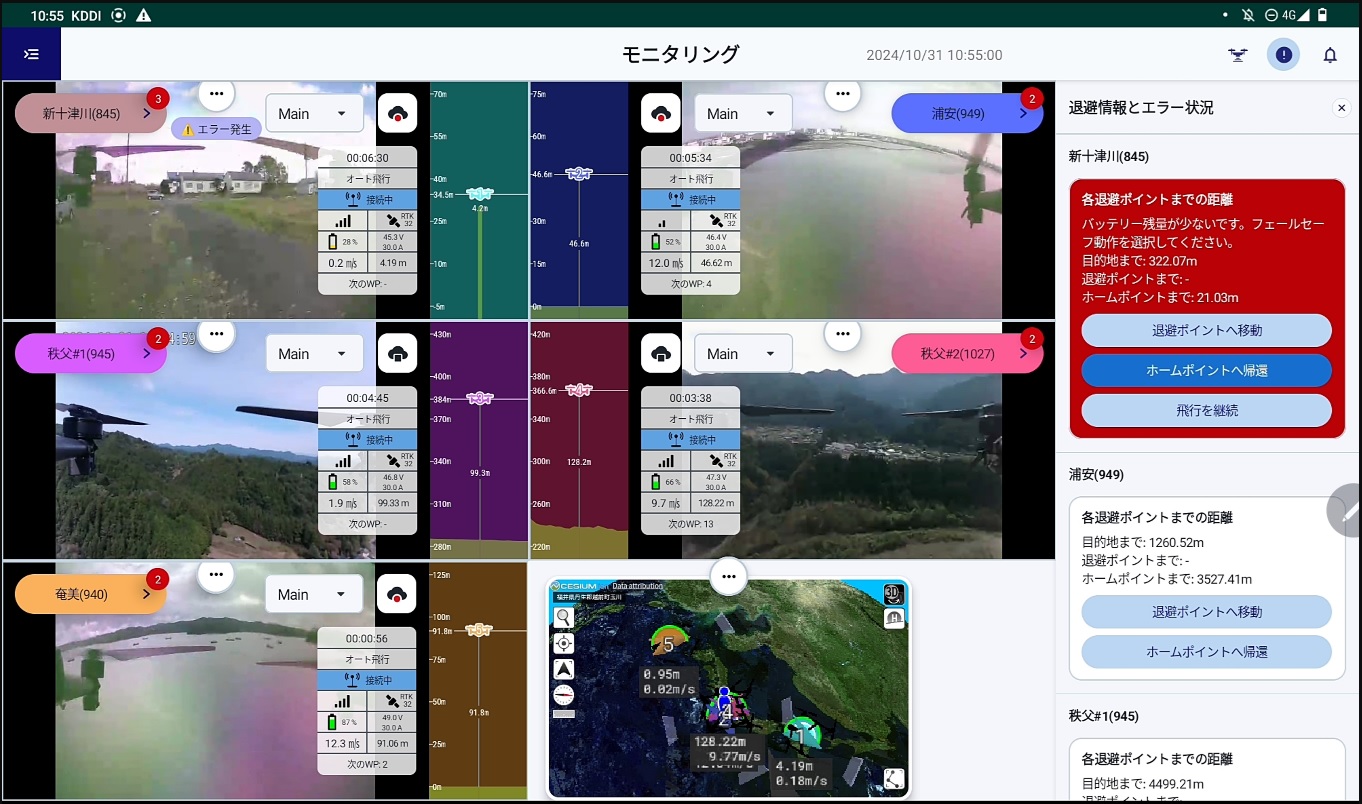
In this demonstration, a flight safety information system was integrated and automated to ensure the simultaneous safety of a large number of drones (five in this test), and a control system was established to clarify the division of roles between the pilot and the system (human-machine interface).
The control system incorporates a function that notifies the pilot of irregularities, such as the unexpected approach of another drone or low battery, through pop-up windows and voice messages, as well as providing guidance to handle these situations. The system was tested to ensure that, even in the event of irregularities, the pilot could complete the flight safely by following the operational manual with the system’s support.
Through this demonstration, JAL, KDDI, and NEDO confirmed the effectiveness of the control system and operational procedures, including the management of irregularities, as well as the challenges involved.
In the future, to systematically establish the requirements, JAL, KDDI, and NEDO will collect and verify data using virtual environments in addition to trials. The findings from this demonstration will also be utilized in designing a system for the simultaneous operation of multiple drones, contributing to the social implementation of drones.












